脊椎手術支援ロボットシステムを視察しました.
更新日 2020.7.19
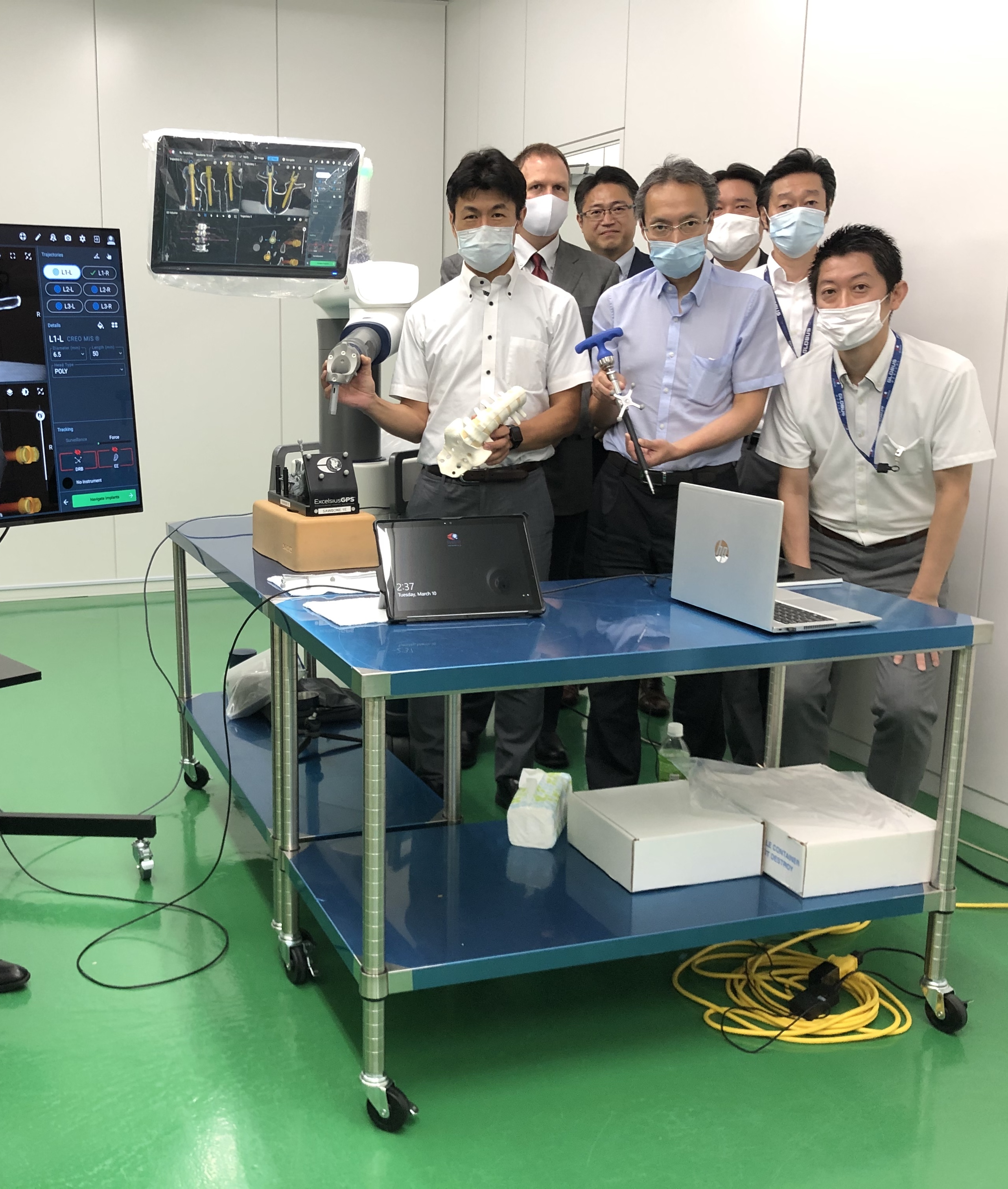
2020年7月18日,都内にありますGlobus社流通センターにて,大鳥精司教授と折田の2名にて同社が導入した手術用ロボットナビゲーションシステム(ExcelsiusGPS(R) ガイド機能付きナビゲーションシステム)を視察して参りました.
同システムは術前・術中CTをもとにして術中にスクリュー刺入方向を視覚的にシミュレーションし,その結果に基づくナビゲーション情報によりロボットに設置されたトロッカーを最適位置に誘導するシステムです.入念な精度評価により精度が保証され,またタッピング,スクリュー刺入は術者自身が行いますので実臨床における安全性は担保されています.
従来の手術台固定方式のものとは異なりロボットは移動が可能であり,実空間内での患者とロボットの位置関係は常に一定に保たれるため自由度が高く,今後は脊椎以外の整形外科手術等にも応用を進めて行く予定とのことです.
本システムはより安全・確実にスクリュー刺入を支援するシステムとして有用と思われ,日本においてさらにブラッシュアップすることによりさらに使いやすいシステムとなる印象を受けました.
千葉大学整形外科は,私の所属する千葉大学フロンティア医工学センターとも連携しながらこのようなナビゲーションシステムの開発・構築にも随時関わって行く所存です.
 .
.